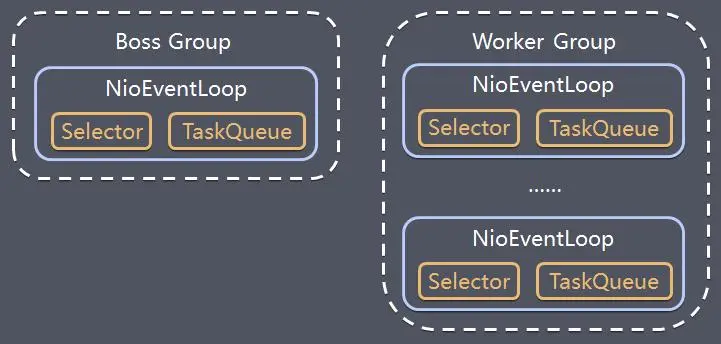
图1 SPI通信一主机与一从机通信时的硬件连接
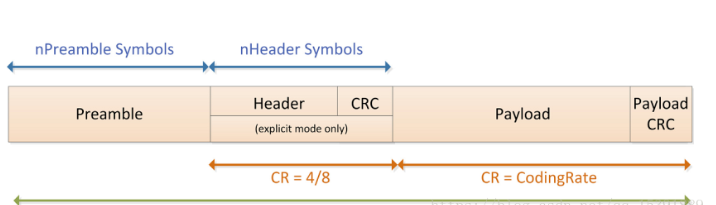
图2 SPI通信一主机与多从机通信时的硬件连接
3 SPI通信协议层
SPI总线在传输数据的同时也传输了时钟信号,所以SPI协议是一种同步(Synchronous)传输协议。Master会根据将要交换的数据产生相应的时钟脉冲,组成时钟信号,时钟信号通过时钟极性(CPOL)和时钟相位(CPHA)控制两个SPI设备何时交换数据以及何时对接收数据进行采样,保证数据在两个设备之间是同步传输的。
首先看下SPI通信的起始条件和终止条件:
起始条件:SS从高电平切换到低电平
终止条件:SS从低电平切换到高电平

图3 SPI通信起始条件和终止条件
再来看SPI通信速率,SPI总线上的主设备必须在通信开始时候配置并生成相应的时钟信号。从理论上讲,只要实际可行,时钟速率就可以是你想要的任何速率,当然这个速率受限于每个系统能提供多大的系统时钟频率,以及最大的SPI传输速率。
然后是SPI通信最重要的时钟极性和时钟相位:
根据硬件制造商的命名规则不同,时钟极性通常写为CKP或CPOL。时钟极性和相位共同决定读取数据的方式,比如信号上升沿读取数据还是信号下降沿读取数据。
CKP可以配置为1或0。这意味着你可以根据需要将时钟的默认状态(IDLE)设置为高或低。极性反转可以通过简单的逻辑逆变器实现。你必须参考设备的数据手册才能正确设置CKP和CKE。
CKP = 0:时钟空闲IDLE为低电平 0;
CKP = 1:时钟空闲IDLE为高电平1。
根据硬件制造商的不同,时钟相位通常写为CKE或CPHA。顾名思义,时钟相位/边沿,也就是采集数据时是在时钟信号的具体相位或者边沿;
CKE = 0:在时钟信号SCK的第一个跳变沿采样;
CKE = 1:在时钟信号SCK的第二个跳变沿采样。
根据SPI的时钟极性和时钟相位特性可以设置4种不同的SPI通信操作模式,它们的区别是定义了在时钟脉冲的哪条边沿转换(toggles)输出信号,哪条边沿采样输入信号,还有时钟脉冲的稳定电平值(就是时钟信号无效时是高还是低),详情如下所示:
Mode0:CKP=0,CKE =0:当空闲态时,SCK处于低电平,数据采样是在第1个边沿,也就是SCK由低电平到高电平的跳变,所以数据采样是在上升沿(准备数据),(发送数据)数据发送是在下降沿。
Mode1:CKP=0,CKE=1:当空闲态时,SCK处于低电平,数据发送是在第2个边沿,也就是SCK由低电平到高电平的跳变,所以数据采样是在下降沿,数据发送是在上升沿。
Mode2:CKP=1,CKE=0:当空闲态时,SCK处于高电平,数据采集是在第1个边沿,也就是SCK由高电平到低电平的跳变,所以数据采集是在下降沿,数据发送是在上升沿。
Mode3:CKP=1,CKE=1:当空闲态时,SCK处于高电平,数据发送是在第2个边沿,也就是SCK由高电平到低电平的跳变,所以数据采集是在上升沿,数据发送是在下降沿。
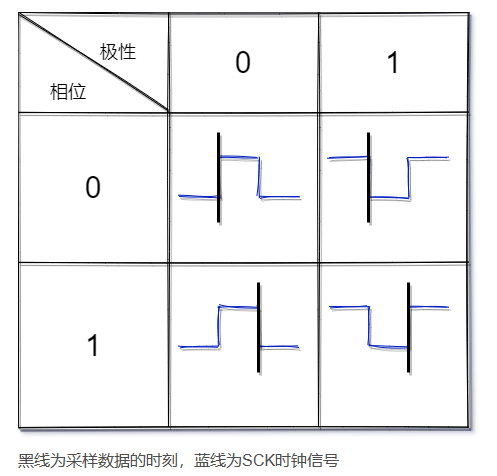
图4 SPI通信时钟极性和时钟相位
| SPI工作模式 | CPOL | CPHA | 空闲时的SCLK电平 | 采样时刻 |
|---|---|---|---|---|
| 0 | 0 | 0 | 低电平 | 奇数边沿 |
| 1 | 0 | 1 | 低电平 | 偶数边沿 |
| 2 | 1 | 0 | 高电平 | 奇数边沿 |
| 3 | 1 | 1 | 高电平 | 偶数边沿 |
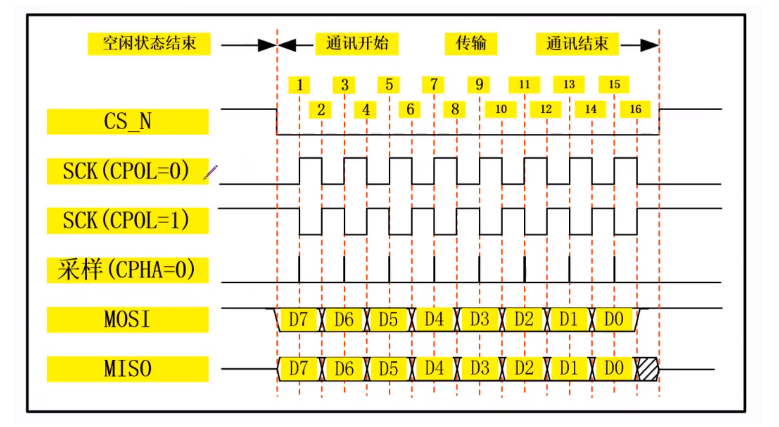
图5 SPI通信四种模式的区别
4 SPI通信内部工作原理
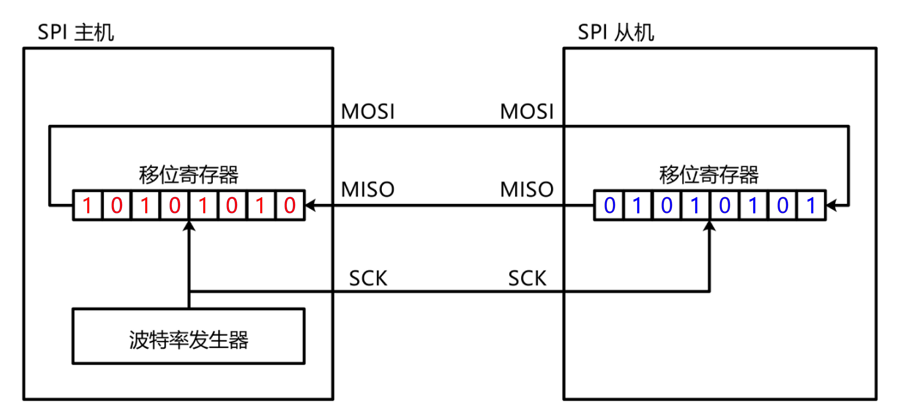
图6 SPI通信主设备和从设备移位寄存器工作原理
SPI总线协议是一种全双工的串行通信协议,数据传输时高位在前,低位在后。SPI协议规定一个SPI设备不能在数据通信过程中仅仅充当一个发送者(Transmitter)或者接受者(Receiver)。在片选信号CS为0的情况下,每个clock周期内,SPI设备都会发送并接收1 bit数据,相当于有1 bit数据被交换了。数据传输高位在前,低位在后(MSB first)。
首先主机会将移位寄存器的高位通过MOSI数据线传送到从机的移位寄存器的最低位;同时,从机的移位寄存器的最高位会通过MISO数据线传送到主机移位寄存器的最低位。两个移位寄存器将最高位的数据传出之后,移位寄存器就会进行向右移位,因此最低位也会腾出空间,让主机的最高位数据放到从机的最低位,从机的最低位数据放到主机的最低位。以此循环八次,就能将一个字节的数据进行转换了。
例如,下图示例中简单模拟SPI通信流程,主机拉低NSS片选信号,启动通信,并且产生时钟信号,上升沿触发边沿信号,主机在MOSI线路一位一位发送数据0X53,在MISO线路一位一位接收数据0X46,如下图所示:
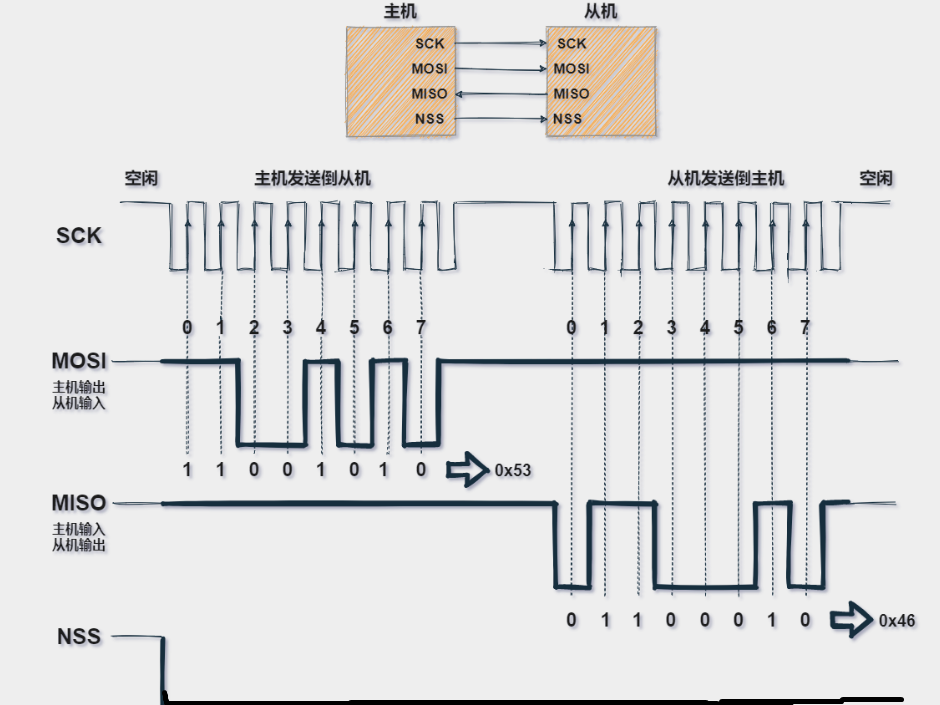
图7 SPI通信主设备和从设备移位寄存器示例
这里有一点需要着重说明一下:SPI只有主模式和从模式之分,没有读和写的说法,外设的写操作和读操作是同步完成的。若只进行写操作,主机只需忽略接收到的字节(虚拟数据);反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。也就是说,你发一个数据必然会收到一个数据;你要收一个数据必须也要先发一个数据。